
Multi-Agent Decision-Support in Adversarial Environments
With my team at Multi AI, I have developed a Multi-Agent Coordination Platform for large-scale transportation and inventory problems in the military. This high-fidelity platform assists wargamers and logisticians in testing and optimizing their transportation and inventory plans against real-world scenarios.

Autonomous Multi-Drone Mission Planning
During the second half of my PhD research, I became increasingly fascinated with multi-agent drone applications, especially for public safety. Coincidentally, I had also long aspired to start my own company. Thus, while still in the midst of my PhD research, I founded a startup to develop multi-drone mission planning solutions for public safety applications. This startup would eventually become Multi AI.

3D Printing with Drones
For most of my PhD research at the University of Texas at Austin, I explored the feasibility of integrating underactuated multicopters (a special type of drone) with 3D printing to enable large-scale and fully remote additive manufacturing. My research tackled fundamental questions regarding positioning accuracy, process synthesis, and practical implementation challenges, ultimately demonstrating the potential of aerial robotic systems as a novel alternative to ground-based 3D printing platforms.

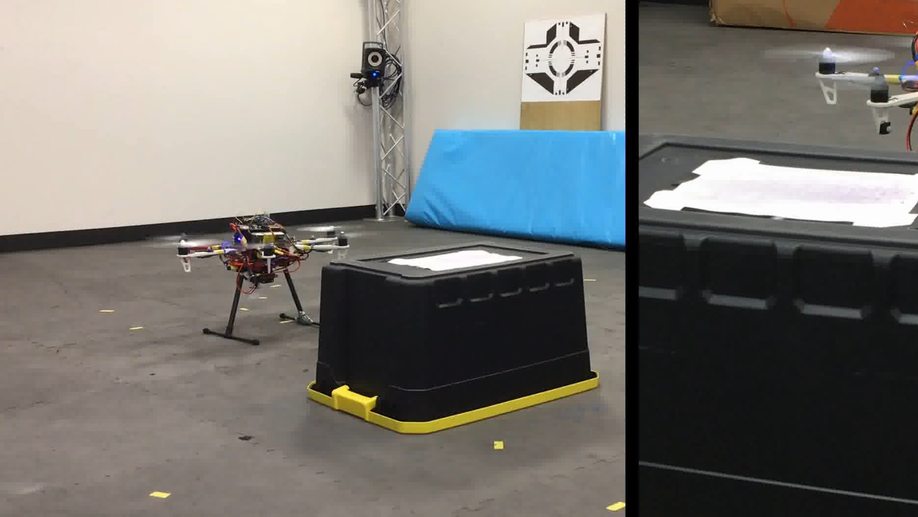
Flying in Cluttered Environments
Part of my research in the Autonomous Systems Group at the University of Texas at Austin included building advanced obstacle avoidance capabilities for the Texas Robotics motion capture space so the group could test their advanced decision-making algorithms for multi-drone applications.

Robot Control and Mechanism Design Projects
This page contains a collection of projects on robot control and mechanism design that I have worked on throughout my graduate studies at the University of Texas at Austin. The first project is a 3-finger gripper mechanism with centralized actuation designed to be a lightweight end-effector for robotic arms or drone payload.

Motion Capture Space with Submillimeter Position Sensing
I oversaw the design, construction, and commissioning of the Texas Robotics large-scale motion capture space in the newly-opened robotics facility at the University of Texas at Austin. Located within the historic Anna Hiss Gymnasium, the motion capture space spans a 35 ft × 35 ft × 20 ft volume and offers submillimeter position sensing with 16 Vicon cameras. The below gif shows the new space in action.
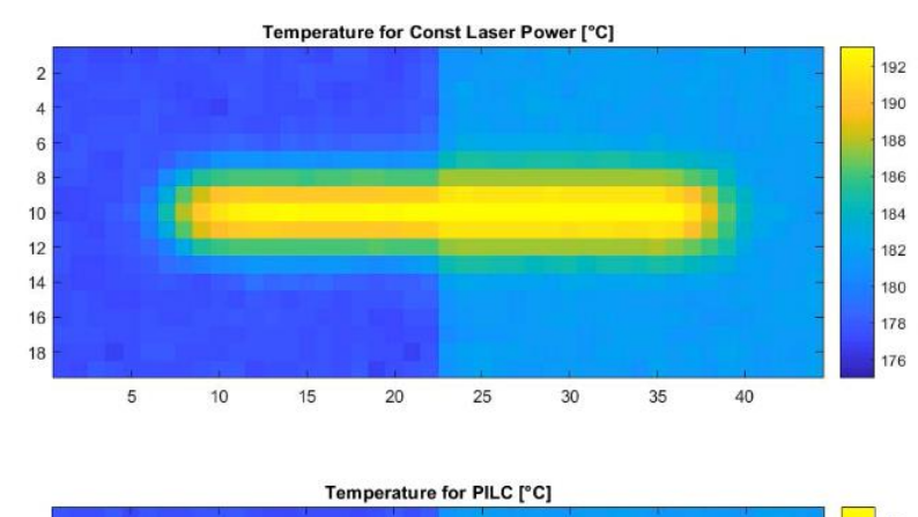
Predictive Iterative Learning Control
During my Master’s research at the University of Texas at Austin, I focused on enhancing the precision and quality of Selective Laser Sintering (SLS) through advanced data-driven control techniques. My work introduced a Predictive Iterative Learning Control (PILC) framework that optimizes the laser power profile dynamically, reducing deviations in post-sintering temperatures and improving overall part quality.

Laser Metal Deposition
At Fraunhofer ILT, I explored cutting-edge additive manufacturing, using Laser Metal Deposition to create high-performance iron-aluminide alloys. By optimizing laser parameters and material transitions, I achieved densities above 99.5%, pushing the limits of metal 3D printing. These alloys are of growing interest for high-temperature and corrosive environments due to their lightweight nature and oxidation resistance, making them suitable for applications such as turbine blades.
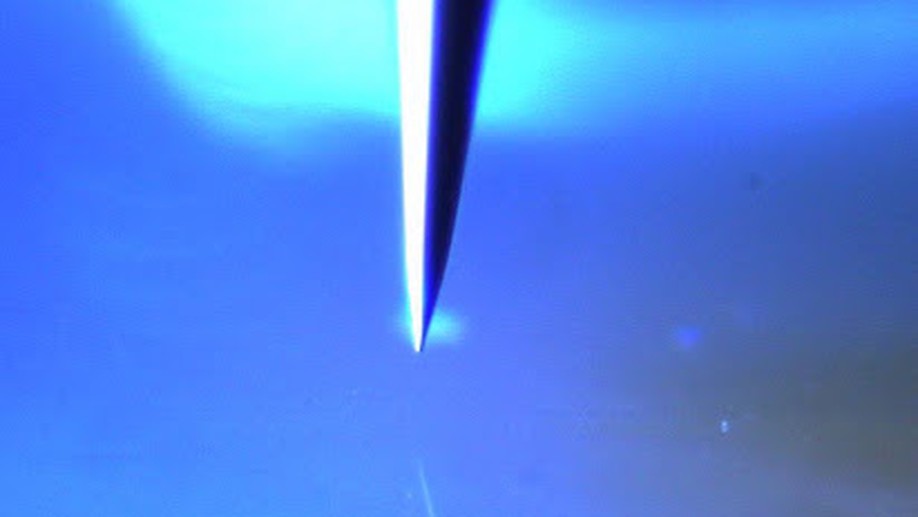
Electrohydrodynamic Jet Printing
As an Undergraduate Research Scholar at the University of Michigan, I had the opportunity to work on Electrohydrodynamic Jet (E-jet) Printing in the Barton Research Group. This high-resolution printing technique utilizes an electric field to manipulate a polarizable liquid, allowing for precision droplet deposition at the nanoscale.