Robot Control and Mechanism Design Projects
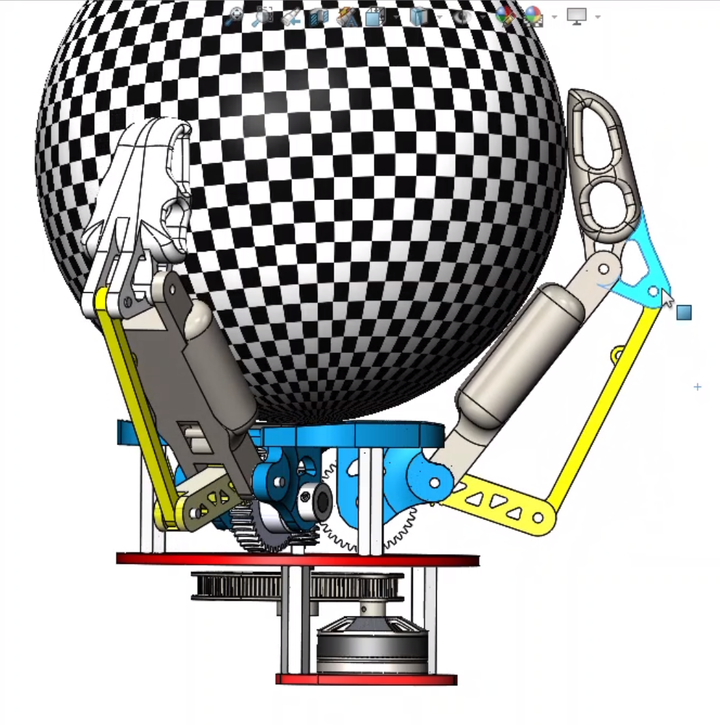 3-finger gripper mechanism with centralized actuation.
3-finger gripper mechanism with centralized actuation.This page contains a collection of projects on robot control and mechanism design that I have worked on throughout my graduate studies at the University of Texas at Austin. The first project is a 3-finger gripper mechanism with centralized actuation designed to be a lightweight end-effector for robotic arms or drone payload.

The second project shows control implementations for a planar 3-link robotic arm and a 6-DOF Stanford arm. The first animation shows the result of a PD controller tracking a desired setpoint. The second animation shows the result of inverse kinematics control to achieve the same setpoint. The third animation shows a simulation of the Stanford Arm following a rectangular trajectory.



The final project is a rehabilitation prototype that was part of the Robot Mechanism Course taught by Dr. Ashish Deshpande at the University of Texas at Austin.

Alexander Nettekoven
Roboticist, Entrepreneur
I have a broad interest in robotics, artificial intelligence, and systems engineering. Reach out if you have any questions, thoughts, or just want to say hi.